205 มม. โช้คอัพขนาดเล็ก AGV Drive Wheels สำหรับ Robot Forklift Servo Motor
-
แสงสูง
ล้อขับเคลื่อน AGV ดูดซับแรงกระแทก
,ล้อขับเคลื่อน AGV 205 มม.
,ล้อขับเคลื่อนรถยก 205 มม.
-
ชื่อผลิตภัณฑ์ล้อ AGV
-
คำสำคัญปริมาณน้อย โหลดมาก
-
ประเภทมอเตอร์ไฟฟ้ากระแสสลับ/กระแสตรง
-
แม็กซ์ โหลดล้อ300KG
-
กระปุกเกียร์ระดับ 2 ตัวลดดาวเคราะห์
-
อุตสาหกรรมที่เกี่ยวข้องอุตสาหกรรมการขนส่ง
-
โครงสร้างรองรับสองเท่า
-
คุณสมบัติเกียร์ดาวเคราะห์คู่ขนาน
-
สถานที่กำเนิดกวางโจว ประเทศจีน
-
ชื่อแบรนด์ZHLUN
-
ได้รับการรับรองCE
-
หมายเลขรุ่นZL-B205
-
จำนวนสั่งซื้อขั้นต่ำต่อรองได้
-
ราคาNegotiable
-
รายละเอียดการบรรจุการบรรจุ: กล่องไม้
-
เวลาการส่งมอบ30 วัน
-
เงื่อนไขการชำระเงินL/C, T/T, เวสเทิร์น ยูเนี่ยน
-
สามารถในการผลิต1,000 ชิ้นต่อเดือน
205 มม. โช้คอัพขนาดเล็ก AGV Drive Wheels สำหรับ Robot Forklift Servo Motor
ล้อไดรฟ์ดูดซับแรงกระแทกขนาดเล็ก 205 มม. ล้อ AGV สำหรับเซอร์โวมอเตอร์ในหุ่นยนต์และรถยก
ข้อมูลจำเพาะ
| รายการ | ข้อมูลมอเตอร์ |
| แบบอย่าง | ZL-B205 |
| ประเภทมอเตอร์ | DC/AC |
| กำลังไฟ S2-60 นาที | 750 วัตต์ |
| อัตราแรงดันไฟฟ้า | 48V |
| อัตราความเร็ว | 3000 รอบ/นาที |
|
อัตราแรงบิด
|
0.64 นิวตันเมตร |
| อัตราปัจจุบัน | 23 อา |
| อัตราทดเกียร์ | 29.86 ฉัน |
|
เส้นผ่านศูนย์กลางล้อ
|
125 มม. |
| ไดรฟ์ความเร็ว | 40 ม./นาที |
คำอธิบาย
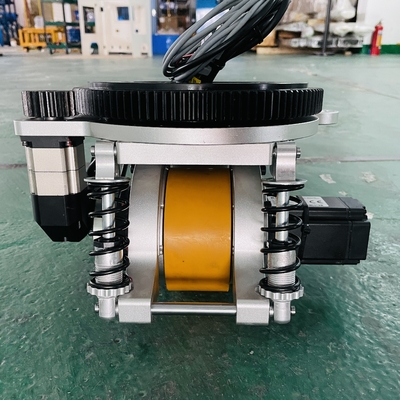
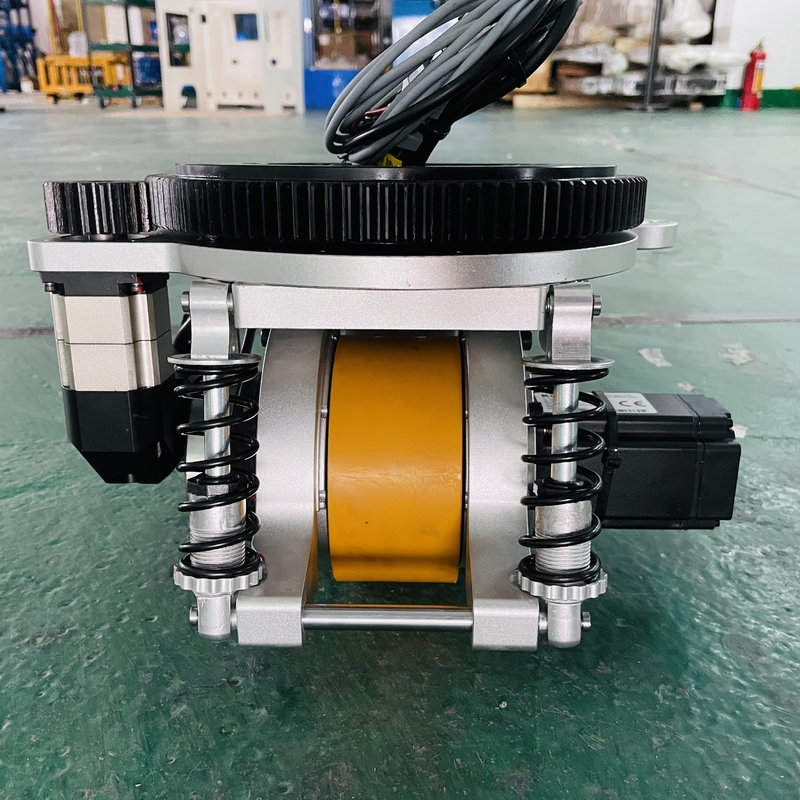
ระบบขับเคลื่อนล้อ ZL ประกอบด้วยล้อ กระปุกเกียร์ดาวเคราะห์ในตัว และตลับลูกปืนในหน่วยสั้นชุดเดียวการรวมระบบขับเคลื่อนล้อเข้ากับมอเตอร์และตัวควบคุมของเราส่งผลให้เกิดระบบขนาดกะทัดรัดที่ช่วยให้การพัฒนาและการผลิตระบบขับเคลื่อนด้วยตัวเองง่ายขึ้น เช่น หุ่นยนต์ซ่อมบำรุงหรือ AGV
ดีไซน์ประหยัดพื้นที่
ทนทานต่อแรงรัศมีสูง
มีเส้นผ่านศูนย์กลางล้อต่างกัน
สามารถใช้ร่วมกับมอเตอร์ได้หลากหลายรวมถึงเบรคและเอ็นโค้ดเดอร์
สามารถสั่งซื้อระบบขับเคลื่อนล้อได้ทั้งแบบมีและไม่มีขายึดสำหรับการผลิตเป็นชุด นาโนเทคยังมียางแบบกดทับที่ทำจากวัสดุคอมโพสิตพิเศษ
ระบบขับเคลื่อนล้อ ZL มีจำหน่ายร่วมกับมอเตอร์หลายขนาด
![]()
![]()
การทำงาน
1. ความหนาแน่นของพลังงานสูงสุด
โหลดรัศมีสูงและอัตราเร่งและความเร็วสูงอย่างต่อเนื่อง
2. อายุการใช้งานยาวนาน
ระบบขับเคลื่อนที่ออกแบบมาเพื่อประสิทธิภาพด้วยล้อ PUR ที่มีอายุการใช้งานยาวนาน
3. ระดับการบำรุงรักษาต่ำ
ส่วนประกอบต่างๆ สามารถเปลี่ยนทีละชิ้นได้ด้วยการออกแบบโมดูลาร์
4. ระบบขับเคลื่อนอัจฉริยะ
ฟังก์ชัน Plug & Play และการตรวจสอบพารามิเตอร์ส่วนกลางโดยใช้ระบบเซ็นเซอร์ที่เป็นอุปกรณ์เสริม
5. บูรณาการระดับสูง
องค์ประกอบการทำงานทั้งหมดอยู่ในพื้นที่ขนาดกะทัดรัดที่มีน้ำหนักน้อยที่สุด
6. การสื่อสารที่ครอบคลุม
ระบบควบคุมการขับที่ครอบคลุมเป็น e-axle ด้วยอินเทอร์เฟซมาตรฐาน (เช่น RS485 / Canopen เป็นต้น)
เพื่อตอบสนองความต้องการของตลาดลอจิสติกส์อัจฉริยะในอนาคต Wittenstein คว้าโอกาสทางการตลาด รวบรวมข้อดีของผู้เชี่ยวชาญอาวุโสและนักวิชาการด้านเครื่องกล อิเล็กทรอนิกส์ และเซอร์โวมอเตอร์ในด้านการรวมเครื่องกลและไฟฟ้าในอุตสาหกรรม และสร้าง ทีม R&D การออกแบบการผลิตและการขายที่แข็งแกร่ง, มุ่งเน้นการพัฒนาโมดูลขับเคลื่อนล้อเฟืองท้าย AGV
โมดูลขับเคลื่อนล้อเฟืองท้ายเป็นโมดูลล้อขับเคลื่อน AGV ที่ออกแบบโดยบริษัทของเรา
ได้รับการออกแบบอย่างล้ำลึกบนพื้นฐานของกลุ่มพวงมาลัยดั้งเดิมตัวลดขนาดและล้อขับเคลื่อนได้รับการออกแบบโดยรวม และมีการเพิ่มมอเตอร์ DC ภายนอกเพื่อให้กลายเป็นส่วนประกอบที่ผสานรวมของล้อขับเคลื่อนสำหรับการเดินแบบเมคคาทรอนิกส์ AGVโครงสร้างเรียบง่าย มีประสิทธิภาพเชื่อถือได้ และติดตั้งและบำรุงรักษาได้ง่ายใน AGV ที่มีขนาดเท่ากัน พื้นที่ของล้อขับเคลื่อนสำหรับการเดินจะลดลง ความจุของแบตเตอรี่เพิ่มขึ้น และความทนทานของ AGV ก็เพิ่มขึ้นตามลำดับเช่นกันนี่คือขนาดที่เล็กของล้อขับเคลื่อนของเราปัจจุบัน ชุดล้อขับเคลื่อน AGV ที่พัฒนาและออกแบบโดย ZHLUN มีผลิตภัณฑ์แบบทางเดียวและรอบทิศทางมันถูกรวมเข้ากับผลิตภัณฑ์ลดขนาด ZHLUN ที่มีข้อดีของความกะทัดรัด ความแข็งแกร่งสูง และทนต่อแรงกระแทก ซึ่งตระหนักถึงผลกระทบที่กะทัดรัดของตัวลดไซโคลิดในตัวในล้อขับเคลื่อน และมีตัวเลือกอัตราส่วนการส่งที่กว้างและยืดหยุ่นมากให้บริการโซลูชั่นที่เชื่อถือได้แก่ลูกค้าในแง่ของน้ำหนักเบา ความจุโหลดสูง แรงบิดสูง ฯลฯ
![]()
![]()
ZHLUN ให้บริการโซลูชั่นที่สมบูรณ์และเป็นมืออาชีพสำหรับ AGV รถยก และหุ่นยนต์อื่นๆ ที่เกี่ยวข้องในอุตสาหกรรมยานยนต์ผลิตภัณฑ์หลักของบริษัท ได้แก่ ล้อขับเคลื่อนไฟฟ้าแรงต่ำ, มอเตอร์แนวนอนในล้อ, มอเตอร์แนวตั้งในล้อ, มีมอเตอร์บังคับเลี้ยวหรือไม่มี, เซอร์โวไดรฟ์ oltage ต่ำ, ตัวควบคุมมอเตอร์อุตสาหกรรม และผลิตภัณฑ์อื่น ๆ การใช้งานรวมถึงหุ่นยนต์เคลื่อนที่, AGV สำหรับงานหนัก, รถยกไร้คนขับ, หุ่นยนต์ตรวจสอบ, อุปกรณ์ทางการแพทย์, หุ่นยนต์ร่วมปฏิบัติงาน, เครื่องอัดเซอร์โว ฯลฯ
![]()
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา