
Brushless Rueda Grua Warehouse AGV Drive Wheel Assemblies Delivery Robot Swivel Casters
-
แสงสูง
ล้อขับเคลื่อน AGV ไร้แปรง
,ล้อขับเคลื่อน AGV ของคลังสินค้า
,ล้อหมุนไร้แปรง
-
การรับประกัน1 ปี
-
รายงานการทดสอบเครื่องจักรให้
-
โหลด1T
-
บริการให้บริการ OEM/ODM
-
สถานที่กำเนิดจีน
-
ชื่อแบรนด์ZHLUN
-
หมายเลขรุ่นZL-210
-
จำนวนสั่งซื้อขั้นต่ำ1
-
ราคา$2000-3000
-
รายละเอียดการบรรจุกล่องไม้
-
เวลาการส่งมอบ30 วัน
-
เงื่อนไขการชำระเงินL/C, D/A, D/P, T/T, Western Union, MoneyGram
-
สามารถในการผลิต30 ต่อเดือน
Brushless Rueda Grua Warehouse AGV Drive Wheel Assemblies Delivery Robot Swivel Casters




Agv Damping Wheel Drive มอเตอร์ Dc แบบไม่มีแปรง Rueda Grua ชุดประกอบล้อคลังสินค้า Delivery Robot Swivel Casters Automat
ข้อมูลบริษัท
กวางโจว Wisdom Wheel Science Technology LTD.
Guangzhou Wisdom Wheel Science Technology Ltd. เป็นองค์กรที่มีเทคโนโลยีสูงที่ผสานรวมการวิจัยบริการ การออกแบบ การผลิต การขาย บริการ และการรวมระบบด้วยสิทธิในทรัพย์สินทางปัญญาที่เป็นอิสระจำนวนหนึ่งตามข้อกำหนดของแอปพลิเคชัน ได้มีการพัฒนาชุดขับเคลื่อนพวงมาลัย AGV ประเภทต่างๆ ที่มีสิทธิ์ในทรัพย์สินทางปัญญาที่เป็นอิสระ ซึ่งรวมถึงงานหนักดูดซับแรงกระแทกต่ำและมินิ, พวงมาลัยไดรฟ์ที่แตกต่างกัน, ฯลฯ.ซึ่งเหมาะสำหรับการใช้งานในด้านต่างๆตามแอปพลิเคชัน บริษัท ออกแบบและพัฒนาอย่างอิสระAGV สำหรับงานหนัก, รถบรรทุกพื้นเรียบไร้คนขับสำหรับงานหนัก, รถยกรอบทิศทาง, AGV ประกอบพิเศษ, หุ่นยนต์บริการ, ที่จอดรถอัจฉริยะ AGV และผลิตภัณฑ์อื่น ๆ, ให้บริการลูกค้าด้วยการปรับแต่ง AGV แบบกำหนดเองและให้บริการเทคโนโลยีด้วยใจจริง สนับสนุนและขยายขอบเขตการใช้งานของ AGV


นิทรรศการหุ่นยนต์โลจิสติกส์นานาชาติของจีน

นิทรรศการ AGV นานาชาติแห่งเอเชีย

นิทรรศการโลจิสติกส์นานาชาติแห่งเอเชีย
ใบรับรอง

พารามิเตอร์ผลิตภัณฑ์
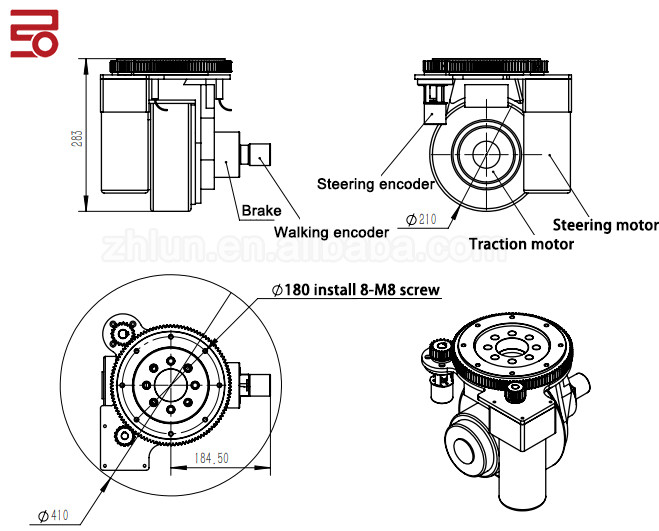
พวงมาลัยประกอบด้วยมอเตอร์ขับเคลื่อน มอเตอร์บังคับเลี้ยว ตัวลดความเร็วและโครงสร้างทางกลอื่นๆ ที่ผสานรวมเข้ากับผลิตภัณฑ์ การเดิน การยึดเกาะ และการบังคับเลี้ยว และสามารถบรรทุกและดึงสินค้าหนักได้AGV, หุ่นยนต์เคลื่อนที่ ฯลฯ สามารถใช้งานได้อย่างรวดเร็วตรงตามข้อกำหนดการใช้งานของ AGV อย่างสมบูรณ์แบบดังนั้นการขับเคลื่อนพวงมาลัยจึงเป็นทิศทางการพัฒนาแอพพลิเคชั่น AGVเมื่อเปรียบเทียบกับวิธีการควบคุมส่วนต่างของรถยนต์ AGV แบบดั้งเดิม พวงมาลัยมีการผสานรวมสูง ปรับเปลี่ยนได้ และมีความแม่นยำสูงกว่าและตอบสนองได้เร็วกว่าด้วยระบบเซอร์โว
โครงสร้างแชสซีของรถเข็น AGV มักใช้รูปแบบของพวงมาลัยเดี่ยว พวงมาลัยคู่ และพวงมาลัยสี่ล้อ ซึ่งปูทางให้ระบบควบคุมการเดินและการบังคับพวงมาลัยของพวงมาลัย และในขณะเดียวกันก็ควบคุมการเดิน และการบังคับเลี้ยวของรถเข็นเพื่อให้เดินได้รอบทิศทางล้อขับเคลื่อนเชื่อมต่อกับเซอร์โวมอเตอร์ตามลำดับ และสามารถปรับความเร็วของล้อและเปลี่ยนทิศทางการหมุนของล้อได้พร้อมกัน ซึ่งจะเป็นการเปลี่ยนความเร็วและทิศทางไปข้างหน้าของรถเข็นโครงสร้างนี้สามารถตรวจสอบความสมดุลและความเสถียรของรถเข็นได้อย่างเต็มที่และความต้องการของโรงงานในการบรรทุกสินค้าสูง
การประยุกต์ใช้ผลิตภัณฑ์


บรรจุภัณฑ์และการขนส่งสินค้า

ข้อดีของเรา
1.ประสบการณ์การใช้งานในอุตสาหกรรมที่หลากหลายและรูปแบบโดยรวมที่เหมาะสมของแผน AGV
2.มีความสามารถในการออกแบบและการรวมที่แข็งแกร่งเพื่อช่วยให้โครงการดำเนินการได้ง่ายขึ้น
3.บริการที่กำหนดเองโดยคำนึงถึงความต้องการของลูกค้าอย่างเต็มที่
4.โซลูชันที่ดีกว่า การออกแบบ การผลิต และการว่าจ้างที่เร็วขึ้น
5.บริการก่อนการขาย การขาย และหลังการขายมีความรอบคอบ ให้การสนับสนุนด้านเทคนิคฟรีตลอดกระบวนการ
คำถามที่พบบ่อย
ถาม: บริษัทของคุณสามารถปรับเปลี่ยนผลิตภัณฑ์ตามสถานการณ์ของลูกค้าได้หรือไม่?
ก. ใช่.เราจะส่งตารางการกำหนดค่าลำดับพวงมาลัยให้คุณลูกค้าสามารถกรอกพารามิเตอร์ที่เกี่ยวข้องตามสถานการณ์ของตนเองได้เราสามารถปรับชิ้นส่วนพวงมาลัยได้ตามความต้องการของลูกค้า
มีอัตราส่วนความเร็ว, ความเร็ว, มอเตอร์เดิน, แรงดันมอเตอร์, เบรก ฯลฯ มีคำแนะนำโดยละเอียดเพิ่มเติมในผลิตภัณฑ์
ตารางพารามิเตอร์ เรายินดีต้อนรับการปรับแต่ง
ถาม: คุณเป็นบริษัทการค้าหรือผู้ผลิต
ตอบ: เราเป็นผู้ผลิต
ถาม: แล้วเวลานำของคุณล่ะ?
ตอบ: ขึ้นอยู่กับปริมาณและการเก็บรักษา
ถาม: แล้วบริการหลังการขายของคุณล่ะ?
ตอบ: เราสามารถให้การสนับสนุนด้านเทคนิคผ่านการสื่อสารออนไลน์การสนับสนุนด้านเทคนิคภายใน 24 ชั่วโมงทางอีเมล การโทร หรือบริการแบบ door-to-door
ถาม: ฉันจะเชื่อถือคุณภาพของผลิตภัณฑ์ของคุณได้อย่างไร
ตอบ: ผลิตภัณฑ์ชุดประกอบพวงมาลัย AGV ได้รับการวิจัยและพัฒนาโดยบริษัทของเราอย่างอิสระเรามีใบรับรองคุณภาพระดับสากลมากมาย เรามีตัวลดดาวเคราะห์ของเราที่พัฒนาและออกแบบ เราทำชุดทดสอบผลิตภัณฑ์ก่อนจัดส่ง
ถาม: ฉันจะได้รับคำติชมหลังจากส่งคำถามนานเท่าใด
ตอบ: เราจะตอบกลับภายใน 12 ชั่วโมงในวันทำการ
ถาม: เราจะแน่ใจได้อย่างไรเกี่ยวกับคุณภาพของเครื่องหลังจากวางคำสั่งซื้อ?
ตอบ: ก่อนส่งมอบเราจะใช้เครื่องครึ่งชั่วโมงเพื่อตรวจสอบความเสถียรและส่งวิดีโอทดสอบให้คุณจนกว่าคุณจะพอใจเราจะตั้งค่าพารามิเตอร์ทั้งหมดอย่างดี
หากคุณต้องการทราบรายละเอียดเพิ่มเติมของผลิตภัณฑ์นอกภาพ โปรดติดต่อเรา
อีเมล: sales2@zhlun.com
ก. ใช่.เราจะส่งตารางการกำหนดค่าลำดับพวงมาลัยให้คุณลูกค้าสามารถกรอกพารามิเตอร์ที่เกี่ยวข้องตามสถานการณ์ของตนเองได้เราสามารถปรับชิ้นส่วนพวงมาลัยได้ตามความต้องการของลูกค้า
มีอัตราส่วนความเร็ว, ความเร็ว, มอเตอร์เดิน, แรงดันมอเตอร์, เบรก ฯลฯ มีคำแนะนำโดยละเอียดเพิ่มเติมในผลิตภัณฑ์
ตารางพารามิเตอร์ เรายินดีต้อนรับการปรับแต่ง
ถาม: คุณเป็นบริษัทการค้าหรือผู้ผลิต
ตอบ: เราเป็นผู้ผลิต
ถาม: แล้วเวลานำของคุณล่ะ?
ตอบ: ขึ้นอยู่กับปริมาณและการเก็บรักษา
ถาม: แล้วบริการหลังการขายของคุณล่ะ?
ตอบ: เราสามารถให้การสนับสนุนด้านเทคนิคผ่านการสื่อสารออนไลน์การสนับสนุนด้านเทคนิคภายใน 24 ชั่วโมงทางอีเมล การโทร หรือบริการแบบ door-to-door
ถาม: ฉันจะเชื่อถือคุณภาพของผลิตภัณฑ์ของคุณได้อย่างไร
ตอบ: ผลิตภัณฑ์ชุดประกอบพวงมาลัย AGV ได้รับการวิจัยและพัฒนาโดยบริษัทของเราอย่างอิสระเรามีใบรับรองคุณภาพระดับสากลมากมาย เรามีตัวลดดาวเคราะห์ของเราที่พัฒนาและออกแบบ เราทำชุดทดสอบผลิตภัณฑ์ก่อนจัดส่ง
ถาม: ฉันจะได้รับคำติชมหลังจากส่งคำถามนานเท่าใด
ตอบ: เราจะตอบกลับภายใน 12 ชั่วโมงในวันทำการ
ถาม: เราจะแน่ใจได้อย่างไรเกี่ยวกับคุณภาพของเครื่องหลังจากวางคำสั่งซื้อ?
ตอบ: ก่อนส่งมอบเราจะใช้เครื่องครึ่งชั่วโมงเพื่อตรวจสอบความเสถียรและส่งวิดีโอทดสอบให้คุณจนกว่าคุณจะพอใจเราจะตั้งค่าพารามิเตอร์ทั้งหมดอย่างดี
หากคุณต้องการทราบรายละเอียดเพิ่มเติมของผลิตภัณฑ์นอกภาพ โปรดติดต่อเรา
อีเมล: sales2@zhlun.com
สินค้าที่เกี่ยวข้อง
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา