-
แสงสูง
พวงมาลัยอัตโนมัติ 8NM
,พวงมาลัยอัตโนมัติ 1000KG
,พวงมาลัยพาวเวอร์ AGV
-
พลัง1.5KW
-
พิมพ์เซอร์โว
-
แรงบิดเบรค8nm
-
โหลดล้อสูงสุด1000KG
-
ไดรฟ์ความเร็ว4.0 กม./ชม
-
จัดอันดับปัจจุบัน74A
-
อัตราแรงดันไฟฟ้า24V
-
ชื่อผลิตภัณฑ์ล้อ AGV
-
สถานที่กำเนิดกวางโจว ประเทศจีน
-
ชื่อแบรนด์ZHLUN
-
ได้รับการรับรองISO9001
-
หมายเลขรุ่นZL-460
-
จำนวนสั่งซื้อขั้นต่ำต่อรองได้
-
ราคาNegotiable
-
รายละเอียดการบรรจุการบรรจุ: กล่องไม้
-
เวลาการส่งมอบ30 วัน
-
เงื่อนไขการชำระเงินL/C, T/T, เวสเทิร์น ยูเนี่ยน
-
สามารถในการผลิต1,000 ชิ้นต่อเดือน
8NM 1000KG AGV ขับเคลื่อนพวงมาลัยอัตโนมัติสำหรับอุปกรณ์จัดเก็บ
พวงมาลัยอัตโนมัติที่ปรับแต่งได้ AGV Drive อุปกรณ์จัดเก็บพวงมาลัย
| ตารางพารามิเตอร์ล้อขับเคลื่อน ZL-210 | ||||
| รายการ | ชื่อ | หน่วย | ค่า | สังเกต |
| 1 | ความสูงในการติดตั้ง | MM | 460 | |
| 2 | เส้นผ่านศูนย์กลางล้อ | MM | 310 | |
| 3 | ความเร็ว | M/MIN | 90/40/60 | เลือกตามความต้องการ |
| 4 | โหลดสูงสุด | กิโลกรัม | 1000 | |
| 5 | มอเตอร์ฉุด | W | 400-1500 | เลือกตามความต้องการ |
| 6 | อัตราส่วนการบังคับเลี้ยว | W | 50-200 | เลือกตามความต้องการ |
| 7 | แรงดันมอเตอร์ | วี | DC24/48 | เลือกตามความต้องการ |
![]()
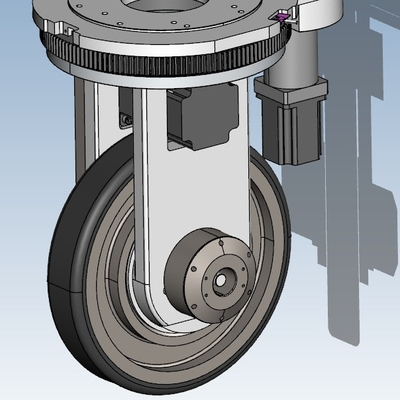
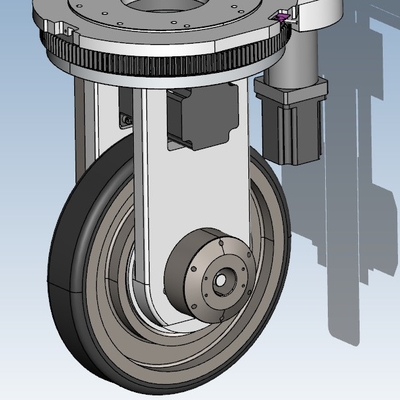
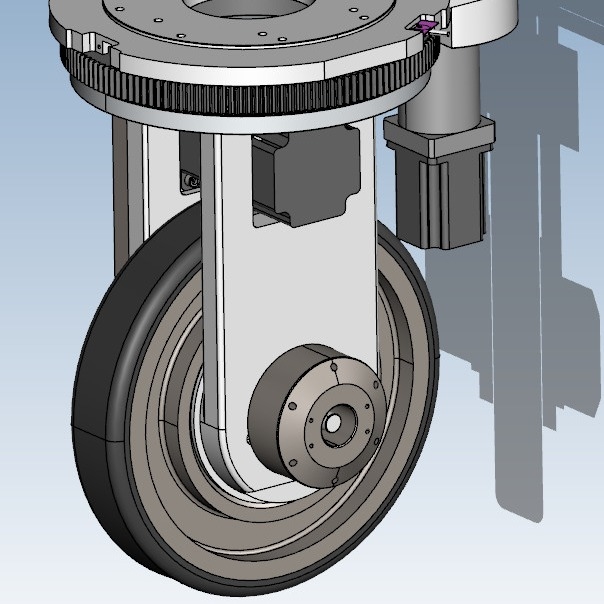
พวงมาลัยคืออะไร?
พวงมาลัยหมายถึงโครงสร้างทางกลที่รวมมอเตอร์ขับเคลื่อน มอเตอร์บังคับเลี้ยว ตัวลดความเร็ว ฯลฯ เมื่อเทียบกับวิธีการควบคุมส่วนต่างของรถ AGV แบบดั้งเดิม พวงมาลัยมีการบูรณาการสูงและความสามารถในการปรับตัวที่แข็งแกร่ง และทำงานร่วมกับตัวควบคุมและเซอร์โวแรงดันต่ำ คนขับ.ปรับใช้ AGV หุ่นยนต์เคลื่อนที่ ฯลฯ อย่างรวดเร็ว
คุณสมบัติของพวงมาลัย AGV:
1. โหลด มาตรฐานตัวถัง AGV ค่อนข้างใหญ่ และความจุแบริ่งต้องสูง
2. ความเร็วสูง เพื่อให้เป็นไปตามจังหวะการผลิตของเวิร์กช็อป AGV ต้องทำงานเร็วขึ้น
3. รอบทิศทาง ในขณะที่ทำการถ่ายโอนแบบเดิมเสร็จสิ้น ฉันยังหวังว่า AGV จะมีความกระตือรือร้นและตอบสนองการดำเนินการมากขึ้น
ความแตกต่างระหว่างพวงมาลัยและเฟืองท้าย
AGV แบบดั้งเดิมใช้ความเร็วส่วนต่างเพื่อขับเคลื่อนตัวถัง AGVไดรฟ์เฟืองท้ายใช้กันอย่างแพร่หลายในการกดสปริงบนล้อเฟืองท้ายแรงกดของสปริงทำให้เกิดแรงเสียดทานเพื่อดึงตัวถังเส้นผ่านศูนย์กลางของล้อของไดรฟ์เฟืองท้ายค่อนข้างเล็ก, เพื่อให้มีแรงเสียดทานมากขึ้น การเคลือบยางจึงค่อนข้างอ่อนสำหรับ AGV แบบเบาบางรุ่น ไดรฟดิฟเฟอเรนเชียลก็ใช้กันอย่างแพร่หลายเช่นกันไดรฟ์เฟืองท้ายอาศัยแรงเสียดทานที่เกิดจากแรงดันสปริง ดังนั้นในกรณีที่รับน้ำหนักมาก การเลื่อนหลุดง่ายเส้นผ่านศูนย์กลางล้อเดียวกันนั้นค่อนข้างเล็ก การผ่านได้ไม่ดี และพื้นผิวล้อไม่ทนต่อการสึกหรอหลักการควบคุมของเฟืองท้าย: ปล่อยให้สองล้อทำงานเพื่อสร้างความแตกต่างของความเร็วเพื่อควบคุมการติดตาม AGV ส่งผลให้กำลังมอเตอร์ไม่เพียงพอบนล้อเดียวเล่น.
ในช่วงเริ่มต้นของการขับเคลื่อนพวงมาลัย มันถูกใช้กับรถยกไฟฟ้า และส่วนใหญ่ใช้พวงมาลัยแบบบูรณาการที่มีเท้าแขนเหล็กหล่อพวงมาลัยแนวตั้ง.
![]()
ลักษณะของการขับเคลื่อนพวงมาลัยมีดังนี้:
1. มีความจุแบริ่งขนาดใหญ่
2. เส้นผ่านศูนย์กลางล้อขนาดใหญ่ ผ่านดี;
3. มอเตอร์เดินและบังคับเลี้ยวเป็นอิสระ เพื่อให้สามารถใช้กำลังของมอเตอร์ได้อย่างเต็มที่
![]()
Guangzhou Wisdom Wheel Science Technology Ltd. ก่อตั้งในปี 2018 เราออกแบบ ผลิตและจำหน่าย agv, การประกอบล้อขับเคลื่อน, มอเตอร์ DC/AC, ตัวเข้ารหัส, ตัวลดเกียร์, ตัวควบคุม, ล้อเลื่อน, ล้อ PU, มอเตอร์ในชุดล้อและทั่วทุกมุมโลก
ZHLUN ยังคงนำเสนอผลิตภัณฑ์ที่ยอดเยี่ยม นวัตกรรมทางเทคโนโลยี และความสะดวกในการปรับแต่งอุปกรณ์อัตโนมัติ บริษัทมีโรงงานของตัวเอง พื้นที่ 1,000 ตารางฟุต และมีพนักงาน 40 คนบริษัทได้รับการรับรองมาตรฐาน ISO9001
![]()
แก่นแท้ของการเติบโตของ ZHLUN คือการอุทิศตนอย่างต่อเนื่องเพื่อแสวงหาความพึงพอใจของลูกค้าอย่างเต็มที่พวกเขามีสถานะที่แข็งแกร่งในตลาดภายในประเทศและต่างประเทศตลอดจนความยืดหยุ่นในการผลิตที่ยอดเยี่ยมZHLUN ได้รับการยอมรับว่าเป็นหนึ่งในซัพพลายเออร์รายใหญ่ที่สุดของไดรฟ์ไฟฟ้า
การลงทุนอย่างต่อเนื่องในเครื่องจักรที่ทันสมัยที่สุดได้เพิ่มและพัฒนาคุณภาพและความยืดหยุ่นของแต่ละผลิตภัณฑ์
วันนี้ ZHLUN สามารถออกแบบและผลิตเครื่องยนต์และคำขอชิ้นส่วนพิเศษจากลูกค้าได้อย่างรวดเร็ว
![]()
ผลิตภัณฑ์ของ ZHLUN ถูกนำมาใช้ในการใช้งานมากมาย ซึ่งรวมถึงแต่ไม่จำกัดเพียง: รถยก, AGV, แท่นลอยฟ้า, เครื่องจักรสนามบิน, เครื่องจักรในการเกษตร, การใช้งานระบบไฮดรอลิก, เครื่องขัดพื้น, รถกวาด, พลังงานลม, การเดินเรือ, และอุปกรณ์การแพทย์
ต้นแบบทั้งหมดได้รับการทดสอบเป็นระยะเวลานานเพื่อตรวจสอบคุณภาพและระยะเวลาจะทำงานได้อย่างสมบูรณ์ก่อนส่งชิ้นส่วนการผลิตให้กับลูกค้าความขยันหมั่นเพียรเป็นสิ่งสำคัญยิ่งต่อความพึงพอใจของลูกค้าของเรา
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา