-
แสงสูง
ยานพาหนะนำทางอัตโนมัติ AGV 600 กก. ยานพาหนะนำทางอัตโนมัติ AGV ยานพาหนะนำทางด้วยตนเอง 600 กก
,AGV Autonomous Guided Vehicles
,600kg self guided vehicles
-
ส่วนประกอบหลักPLC, มอเตอร์
-
แอปพลิเคชันการจัดการวัสดุ
-
มิติL1875*W580*H350
-
น้ำหนักบรรทุก600กก.
-
ความเคลื่อนไหวแบบสองทิศทาง
-
วัสดุเหล็กกล้าไร้สนิม
-
น้ำหนัก (กิโลกรัม)250
-
ใบรับรองCE
-
สถานที่กำเนิดกวางโจว ประเทศจีน
-
ชื่อแบรนด์ZHLUN
-
ได้รับการรับรองISO9001
-
หมายเลขรุ่นZL-TR-K1
-
จำนวนสั่งซื้อขั้นต่ำต่อรองได้
-
ราคาNegotiable
-
รายละเอียดการบรรจุการบรรจุ: กล่องไม้
-
เวลาการส่งมอบ25 วัน
-
เงื่อนไขการชำระเงินL/C, T/T, เวสเทิร์น ยูเนี่ยน
-
สามารถในการผลิต1,000 ชิ้นต่อเดือน
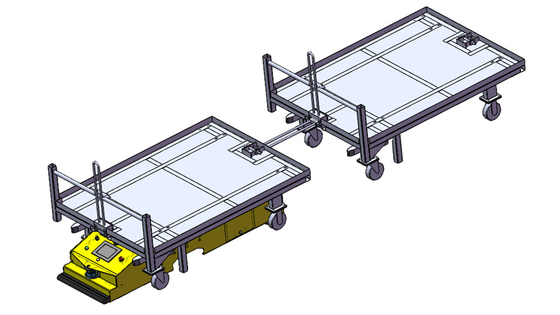
สองทิศทาง 600kg AGV Autonomous Guided Vehicles Self Guided Vehicles
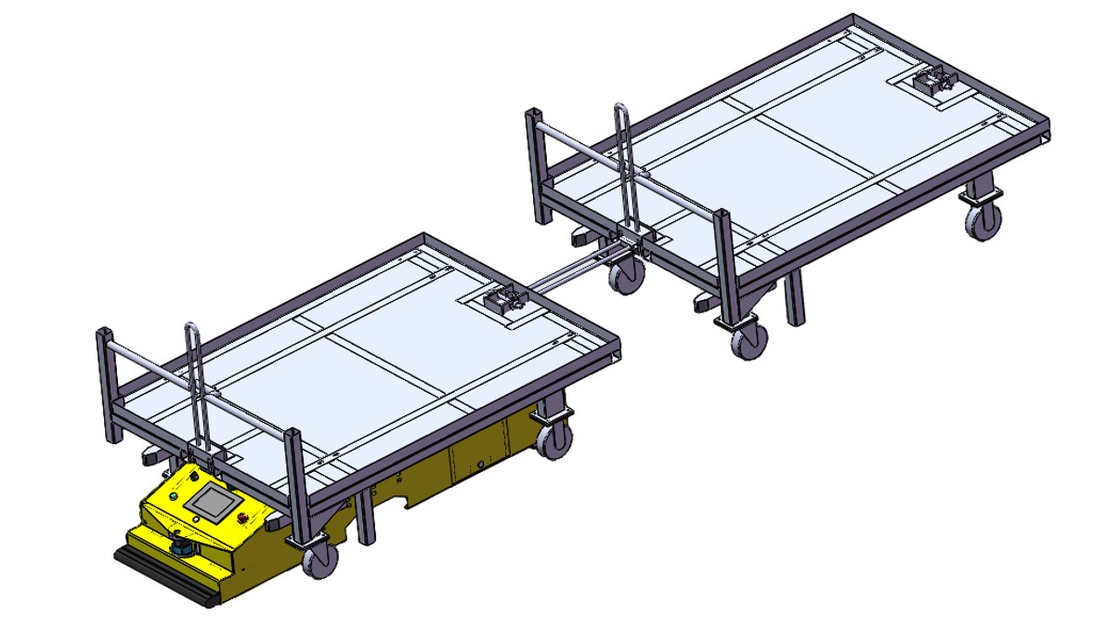
AGV Logitech Driving Wheel คู่มืออัตโนมัติคลังสินค้า Agv สำหรับอุตสาหกรรม
AGV เป็นเกจมาตรฐาน รถไฟไฟฟ้าหลายหน่วยความเร็วสูงที่ออกแบบและสร้างโดยอัลสตอมอัลสตอมนำเสนอ AGV ในรูปแบบตู้โดยสารตั้งแต่เจ็ดถึงสิบสี่ตู้ ที่นั่ง 245 ถึง 446 คนรถไฟถูกสร้างขึ้นจากหน่วยที่ประกอบด้วยรถสามคันและรถพ่วงขับเดี่ยวความเร็วสูงสุดเชิงพาณิชย์คือ 360 กม./ชม.
![]()
การใช้รถเข็น AGV ในโรงงานผลิตมีมากขึ้นเรื่อยๆมันสามารถตระหนักถึงการจัดการที่ไม่มีคนควบคุม และตระหนักถึงระบบอัตโนมัติของออนไลน์อัตโนมัติ ออฟไลน์อัตโนมัติ และการถ่ายโอนจากผลิตภัณฑ์ไปยังวัสดุซึ่งเป็นทางออกที่ดีในการปรับปรุงประสิทธิภาพของการขนส่งการผลิตในกระบวนการผลิต มักมีการขนส่งข้ามพื้น ซึ่งสามารถทำได้สำหรับ AGVในปัจจุบัน ผู้ผลิต AGV ที่มีอำนาจมากขึ้นสามารถขนส่งอัตโนมัติข้ามชั้นได้ความยากในการขนส่งข้ามพื้นของ AGV คือการแก้ปัญหาเทคโนโลยีของรถเข็น AGV ที่ใช้ลิฟต์โดยอัตโนมัติ
รถ AGV ขึ้นลิฟต์อัตโนมัติอย่างไร?
ขั้นตอนการขึ้นลิฟต์อัตโนมัติของรถ AGV แบ่งเป็นขั้นตอนดังนี้
![]()
1. รถ AGV มาถึงประตูลิฟต์และหยุด และระบบควบคุม AGV จะส่งคำสั่งคำขอเข้าลิฟต์ไปยังลิฟต์ผ่านเครือข่าย
2. หลังจากที่ลิฟต์รับสัญญาณจากระบบควบคุม AGV แล้ว ลิฟต์ก็จะเปิดประตูและรักษาสถานะเปิดตามปกติและตอบรับสัญญาณว่าลิฟต์ถูกเปิดออกสู่ระบบควบคุม AGV แล้ว
3. หลังจากได้รับสัญญาณว่าลิฟต์เปิดแล้ว ระบบควบคุม AGV จะออกคำสั่งขับรถไปยังรถเข็น AGV และรถเข็น AGV จะเข้าสู่ลิฟต์
4. หลังจากที่รถ AGV เข้าสู่ลิฟต์ มันจะส่งคำสั่งชั้นไปที่ลิฟต์ลิฟต์รับคำสั่ง ปิดลิฟต์ และมาถึงชั้นที่กำหนด
5. หลังจากที่ลิฟต์ไปถึงชั้นที่กำหนด ประตูลิฟต์จะเปิดขึ้นและคงสถานะเปิดตามปกติและส่งสัญญาณประตูลิฟต์เปิดตามปกติไปยังระบบควบคุม AGV
6. หลังจากที่ระบบควบคุม AGV ได้รับการมาถึงที่ชั้นที่กำหนด จะส่งคำสั่งขับรถไปยังรถเข็น AGV และรถเข็น AGV ใช้ลิฟต์
7. หลังจากที่รถเข็น AGV ออกจากลิฟต์ ระบบควบคุม AGV จะส่งสัญญาณย้อนกลับไปยังลิฟต์ ประตูลิฟต์ปิด และเข้าสู่รอบถัดไป
ในกระบวนการทั้งหมด เราสามารถเข้าใจได้ว่าเป็นปฏิสัมพันธ์ระหว่างรถ AGV ระบบการจัดการการจัดส่ง AGV และลิฟต์อัจฉริยะซึ่งรวมถึงการทำงานร่วมกันระหว่างรถยนต์ AGV และระบบการจัดการการจัดส่ง AGV ผ่านเครือข่ายไร้สาย และระบบการจัดการการจัดส่ง AGV และการแลกเปลี่ยนข้อมูลระหว่างลิฟต์
![]()
จุดประสงค์หลักคือการแบ่งปันระบบ AGV และกระบวนการปฏิสัมพันธ์ของลิฟต์กับคุณ: AGV ใช้สำหรับการลงทะเบียนลิฟต์ → การลงทะเบียนตอบรับลิฟต์สำเร็จ → AGV สืบค้นชั้นลิฟต์ → ชั้นป้อนกลับของลิฟต์ → AGV ขอประตูลิฟต์ → ล็อคประตูลิฟต์ → AGV เข้า/ออกจากลิฟต์ → AGV หยุดส่งคำขอเปิดประตู → ปิดประตูลิฟต์ → ปล่อยลิฟต์สำเร็จ
ด้วยการปรับปรุงเทคโนโลยี AGV สถานการณ์การใช้งานของ AGV จะได้รับการขยายเพิ่มเติมในอนาคต รถลาก AGV จะสามารถปรับให้เข้ากับสถานการณ์การทำงานที่ซับซ้อนมากขึ้น เช่น สิ่งกีดขวางหลายชั้น ข้ามพื้น และคลังสินค้าที่รก และสามารถรับรองความปลอดภัย ความเสถียร ความน่าเชื่อถือ และความเป็นระเบียบเรียบร้อยของกระบวนการจัดการด้านลอจิสติกส์ได้มากขึ้น
|
รายการ
|
ข้อมูลจำเพาะ
|
|
แบบอย่าง
|
ZL-TR-K1 |
|
ขนาด
|
L1875*W580*H350
|
|
คู่มือวิธีการ
|
การนำทางด้วยแม่เหล็ก
|
|
ทิศทางการเดิน
|
เดินหน้า ถอยหลัง
|
|
ความเร็วไปข้างหน้า
|
90m/นาที
|
|
ความจุ
|
600Kg
|
|
แบตเตอรี่
|
แบตเตอรี่ลิเธียม
|
|
วิธีการชาร์จ
|
การชาร์จแบบไร้สาย
|
|
วิธีการแสดงไฟฟ้า
|
จอแสดงผลอิเล็กทรอนิกส์
|
|
ระยะตรวจจับความปลอดภัย
|
3m
|
|
แบบฟอร์มนาฬิกาปลุก
|
นาฬิกาปลุกเพลงและไฟเตือน
|
|
ระบบพลังงาน
|
มอเตอร์ BLDC
|
|
ระบบรักษาความปลอดภัย
|
การหลีกเลี่ยงอุปสรรคอินฟราเรด การออกแบบป้องกันการชนกันทางกล ปุ่มหยุดฉุกเฉิน
|
รูปภาพโรงงาน
![]()
![]()
![]()
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา