
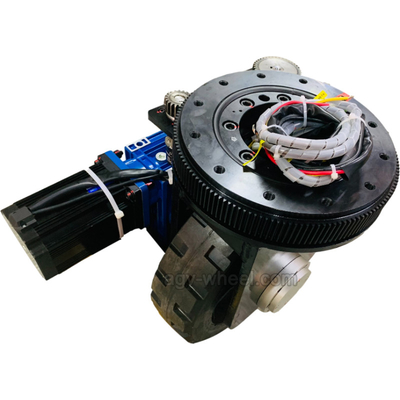
ดอกยาง 2T โหลดแรงดึงสูงล้อขับเคลื่อนมอเตอร์กระแสสลับ 15 กม. / ชม. ล้อหุ่นยนต์สำหรับงานหนัก
-
แสงสูง
2T AC Motor Drive Wheel
,15km / h AC Motor Drive Wheel
,15km / h ล้อหุ่นยนต์สำหรับงานหนัก
-
ดอกยางยางดิน
-
เส้นผ่านศูนย์กลางล้อ400mm
-
โหลด2T
-
ความเร็ว15 กม./ชม
-
แรงฉุด2000w
-
พวงมาลัยพาวเวอร์750w
-
จัดอันดับแรงบิดเอาท์พุท143Nm
-
ใช้ฉากกลางแจ้ง
-
สถานที่กำเนิดกวางโจว ประเทศจีน
-
ชื่อแบรนด์ZHLUN
-
หมายเลขรุ่นZL-490
-
จำนวนสั่งซื้อขั้นต่ำต่อรองได้
-
ราคาNegotiable
-
รายละเอียดการบรรจุการบรรจุ: กล่องไม้
-
เวลาการส่งมอบ25 วัน
-
เงื่อนไขการชำระเงินแอล/C, ที/ที
-
สามารถในการผลิต1,000 ชิ้นต่อเดือน
ดอกยาง 2T โหลดแรงดึงสูงล้อขับเคลื่อนมอเตอร์กระแสสลับ 15 กม. / ชม. ล้อหุ่นยนต์สำหรับงานหนัก

ล้อหุ่นยนต์สำหรับงานหนักดอกยาง 2T รับแรงฉุดลากสูง
ข้อมูลจำเพาะ
|
ไม่
|
รายการ
|
หน่วย
|
ข้อมูล
|
|
1
|
ความสูงในการติดตั้ง
|
mm
|
490
|
|
2
|
โหลด
|
กิโลกรัม
|
2000
|
|
3
|
ประเภทมอเตอร์
|
/
|
BLDC/เซอร์โว
|
|
4
|
มอเตอร์ฉุด
|
KW
|
2
|
|
5
|
อัตราส่วนความเร็ว
|
/
|
1:15
|
|
6
|
มอเตอร์พวงมาลัย
|
KW
|
0.75
|
|
7
|
ความเร็ว
|
กม./ชม
|
15
|
|
8
|
เส้นผ่านศูนย์กลางล้อ
|
mm
|
400
|
|
9
|
ความกว้างของล้อ
|
mm
|
100
|
|
10
|
เซนเซอร์
|
/
|
ไม่จำเป็น
|
|
11
|
แรงบิดสูงสุด
|
นม
|
143
|
|
พารามิเตอร์บางอย่างสามารถปรับได้
|
|||
คุณสมบัติ
โครงสร้างป้องกันการสั่นสะเทือนของล้อและกลไกการบังคับเลี้ยวที่มีแรงบิดสูงของล้อที่มีตลับลูกปืนเม็ดโค้งเรียวได้รับการออกแบบมาอย่างเข้มงวดเพื่อให้ตรงตามข้อกำหนดด้านการใช้งาน
ขึ้นอยู่กับเลย์เอาต์ล้อเฉพาะและไดนามิกของรถ โมเดลไคเนมาติกแบบหมุนได้ เช่นเดียวกับโมเดลไดนามิกแบบตรงและแบบหมุนของ AGV ถูกสร้างขึ้น
เพื่อตรวจสอบลักษณะการเคลื่อนที่ของล้อภายใต้ภาระหนักในสถานะการเคลื่อนที่สามสถานะ รวมถึงการเคลื่อนที่ตรง การหมุนตัวเอง และการหมุนรอบจุดหนึ่ง การจำลองใน ADAMS และการทดลองในโรงงานได้ดำเนินการทั้งหมดแล้ว
ผลการจำลองระบุว่าแรงปกติและแรงเสียดทานของล้อมีความเสถียรสูง ยกเว้นการแกว่งเล็กน้อย ซึ่งเกิดจากการกระจายโหลดที่ไม่อยู่ตรงกลางบน AGV
ผลการทดลองเกี่ยวกับความเร็วในการขับขี่ของ AGV แสดงให้เห็นโดยตรงว่าความแม่นยำในการวางตำแหน่งนั้นเพียงพอสำหรับใช้ในสายการประกอบเครื่องบินจริง
มีการเสนอแผนการจัดวางล้อกลางแจ้งแบบใหม่สำหรับ AGV สำหรับงานหนักรอบทิศทาง ซึ่งช่วยเพิ่มความสามารถในการปฏิบัติงานและการเคลื่อนที่ของ AGVAGV ยังนำเสนอฟังก์ชันการทำงานร่วมกันระหว่างมนุษย์และเครื่องจักรสำหรับการขนส่งชิ้นงานขนาดใหญ่อย่างชาญฉลาดและประหยัดในอุตสาหกรรมการบินและอวกาศและอุตสาหกรรมหนักอื่นๆ
![]()
![]()
![]()
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา