
ล้อขับเคลื่อนมอเตอร์ AC อัตโนมัติ AGV Integrated Wheels 3000r / min สำหรับการขนส่ง
-
แสงสูง
ล้อขับเคลื่อนมอเตอร์ AC 1000KG
,ล้อขับเคลื่อนมอเตอร์ AC 3000r / นาที
,ล้อรวม AGV
-
พิมพ์ล้อไฟฟ้า
-
การทำงานการฉุดลากและการบังคับเลี้ยว
-
กล่องเกียร์สองเวที
-
ประเภทมอเตอร์แปรง
-
คุณสมบัติการส่งผ่านดาวเคราะห์คู่ขนาน
-
โหลดสูงสุด1000KG
-
เส้นผ่านศูนย์กลางล้อ210 มม.
-
วัสดุล้อเหล็ก(เหล็ก)เหล็ก
-
สถานที่กำเนิดกวางตุ้ง ประเทศจีน
-
ชื่อแบรนด์ZHLUN
-
หมายเลขรุ่นZL-210
-
จำนวนสั่งซื้อขั้นต่ำต่อรองได้
-
ราคาNegotiable
-
รายละเอียดการบรรจุการบรรจุ:กล่องไม้
-
เวลาการส่งมอบ25 วัน
-
เงื่อนไขการชำระเงินแอล/C, ที/ที
-
สามารถในการผลิต1,000 ชิ้นต่อเดือน
ล้อขับเคลื่อนมอเตอร์ AC อัตโนมัติ AGV Integrated Wheels 3000r / min สำหรับการขนส่ง
ล้อขับเคลื่อนมอเตอร์ไฟฟ้ากระแสสลับแบบไฟฟ้าอัตโนมัติสำหรับการขนส่ง
ข้อมูลจำเพาะ
รายการ | ข้อมูลมอเตอร์ |
แบบอย่าง | ZL-210 |
ประเภทมอเตอร์ | แปรงถ่าน |
ข้อมูลฉุดลาก | |
กำลังไฟ (W) | 750 วัตต์ไม่จำเป็น |
แรงดันไฟฟ้า (V) | 48 V |
จัดอันดับความเร็ว(รอบต่อนาที) | 3000 รอบ/นาที |
จัดอันดับปัจจุบัน(A) | 19.5 A |
แรงบิดสูงสุด (Nm) | 2.39 นิวตันเมตร |
แรงบิดเบรค(Nm) | 8 นิวตันเมตร |
อัตราทดเกียร์(ผม) | 34.14i |
เส้นผ่านศูนย์กลางล้อ (มม.) | 250 มม. |
ตัวเข้ารหัส | ไม่จำเป็น |
ข้อมูลพวงมาลัย | |
กำลังไฟ S2-60 นาที | 400Wไม่จำเป็น |
จัดอันดับแรงดันไฟฟ้า | 48 V |
จัดอันดับปัจจุบัน | 11 อา |
อัตราความเร็ว | 3000 รอบ/นาที |
อัตราแรงบิด | 1.24Nm |
อัตราส่วนการลดรวม | 320i |
ตัวเข้ารหัส | ไม่จำเป็น |
คำอธิบาย
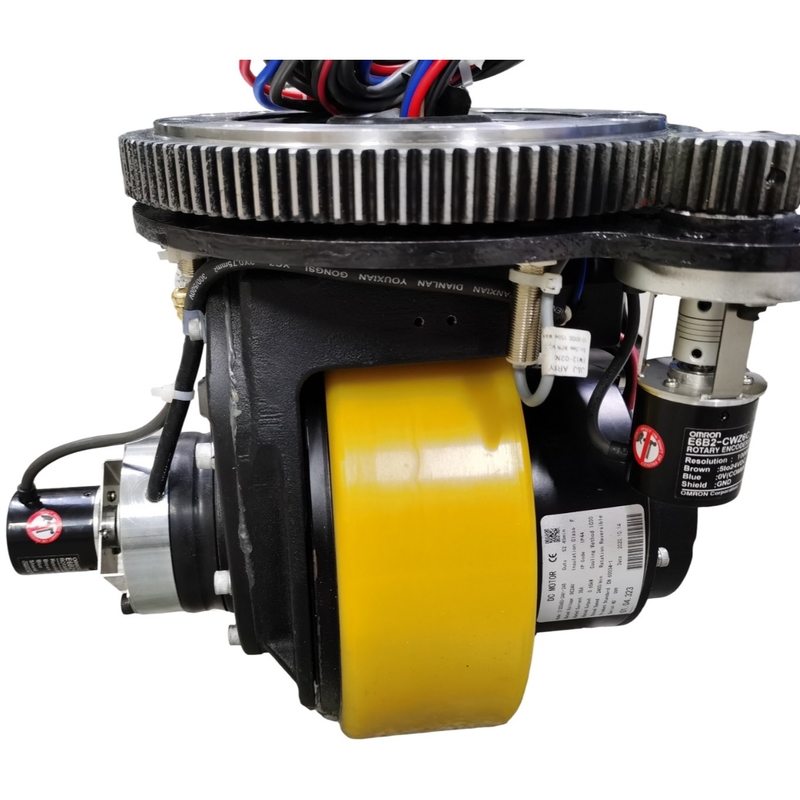
ระบบพวงมาลัยรวมฟังก์ชั่นการขับขี่และการบังคับเลี้ยวของหุ่นยนต์ AGV รวมถึงคนขับ มอเตอร์ขับเคลื่อน กล่องเกียร์ มอเตอร์พวงมาลัย อุปกรณ์ลดความเร็ว ล้อ อุปกรณ์เบรก ลิมิตสวิตช์ และชิ้นส่วนเสริม
ระบบพวงมาลัยเป็นส่วนควบคุมการขับเคลื่อนของหุ่นยนต์ AGVหลังจากรับสัญญาณขับเคลื่อนจากระบบควบคุมที่เหนือกว่าแล้ว ก็สามารถขับเคลื่อนล้อไปยังจุดหมายปลายทางด้วยความเร็วที่กำหนดหลังจากรับสัญญาณพวงมาลัยก็สามารถควบคุมทิศทางของล้อได้ในกระบวนการนี้ จำเป็นต้องตรวจสอบให้แน่ใจว่าการควบคุมความเร็วของล้อและการควบคุมตำแหน่งของล้อได้รับการประสานงานและประสานงานกัน เพื่อให้หุ่นยนต์ AGV ขับเคลื่อนและบังคับเลี้ยวได้อย่างราบรื่น แม่นยำ และยืดหยุ่น
คุณสมบัติของสินค้า
1) การออกแบบแบบบูรณาการ ด้วยการออกแบบร่วมกันของตัวพวงมาลัยและตัวขับ ผลิตภัณฑ์มีการจับคู่ระบบที่ดีกว่า ต้นทุนที่สูงขึ้น และการว่าจ้างที่เรียบง่าย ซึ่งสะดวกและใช้งานง่าย
2) ประสิทธิภาพที่ยอดเยี่ยม
a ) การควบคุมที่เสถียร: นำเทคโนโลยีการควบคุมเวกเตอร์และการกรองมาใช้เพื่อให้เกิดการควบคุมที่เสถียรและให้แรงบิดสูงสุด 2-3 เท่าและประสิทธิภาพที่ดีที่สุด
b) การควบคุมความเร็วที่หลากหลาย: ตระหนักถึงการควบคุมความเร็วที่ต่ำและความเร็วสูง ความเร็วต่ำสุดอยู่ภายใน 0.1m
![]()
![]()
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา